


新闻聚焦





重庆大学自动化学院举办“机器人强化学习与智能控制理论”前沿论坛
发布时间:2023-11-07 资料来源: 重庆大学官网 点击次数:432
2023年11月3日至11月4日,重庆大学自动化学院在虎溪校区信息技术科研楼A316会议室举办“机器人强化学习与智能控制理论” 前沿论坛。论坛由重庆大学自动化学院院长苏晓杰、讲师田羽锋主持,讲座邀请了多位机器人控制领域的知名专家学者作大会报告,校内外百余名师生,一起齐聚会议室,聆听学术盛宴。
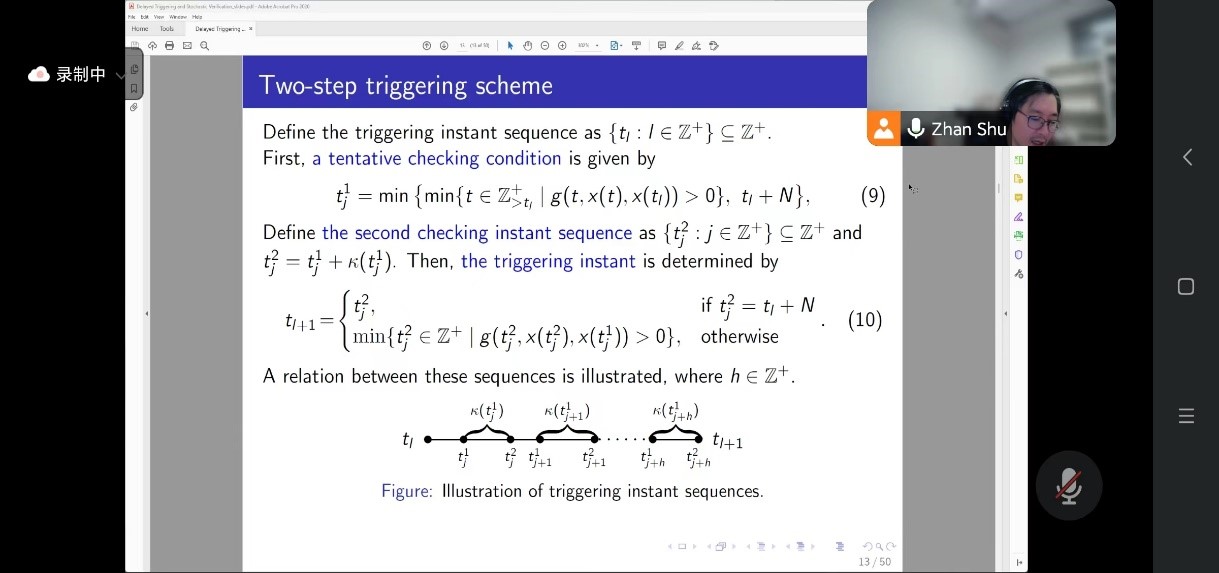
苏晓杰对各位学者的到来表示了热烈欢迎,并简要介绍了参会学者的情况,5位大会报告人分别是IEEE Fellow、岭南大学副校长Kwong Sam Tak Wu教授,IEEE SMC Distinguished Lecture、欧洲科学院院士Peng Shi教授, IEEE Fellow、高被引学者Hak-Keung Lam教授,挪威技术科学院(NTVA)院士、阿格德大学(University of Agder)的Jing Zhou教授,IEEE Transactions on Automatic Control等期刊副主编、阿尔伯塔大学Zhan Shu副教授。与会学者分别就其研究的前沿领域和热点问题作大会报告。

Kwong Sam Tak Wu详细介绍了他在基于机器学习和深度神经网络的视频编码的最新研究成果,并探讨了该方法在现实世界的应用;Peng Shi就具有多个非自治领导的异构多智能体系统在拒绝服务(DOS)攻击下的二分平均跟踪控制问题做了汇报和分享,提出了一种新型的分布式最优控制器;Hak-Keung Lam就基于模糊模型的控制系统和方法进行了简要回顾,并对隶属函数相关稳定性进行了分析;Jing Zhou就其在“Adaptive Quantized Control of Uncertain Dynamic Systems”的研究讨论了动态系统在存在不确定性、非线性动力学和量化的情况下的自适应控制;Zhan Shu提出了一种延迟触发策略和随机验证方案,并验证了该方法的有效性。
此次学术论坛内容丰富,讲解深入浅出,师生踊跃提问并与学者积极交流,讨论氛围十分热烈。此次系列讲座为学生提供了与国际顶尖专家面对面交流的机会,也使大家对控制理论的研究产生了新的认识,对今后的科学研究有着一定的引导意义。
此次论坛由重庆大学自动化学院主办,IEEE Beijing Section, Systems, Man, and Cybernetics and Robotics and Automation Joint Societies Chapter、重庆大学自动化学院人工智能研究院、机器人与智能系统研究所、系统智能与控制国际合作联合实验室及CAA重庆大学学生分会联合承办。

 023-65120501
023-65120501
 在线咨询
在线咨询
 干部培训
干部培训
 定制方案
定制方案







 在线咨询
在线咨询
 联系电话
联系电话

 相关新闻
相关新闻

